Standardowo bogato wyposażone falowniki wektorowe POSIDRIVE FDS5000:
- w zakresie mocy od 0,37kW do 7,5kW
- dwie grupy wielkości
- modułowa budowa
- przejrzysty wyświetlacz 2-liniowy
- klawiatura do programowania
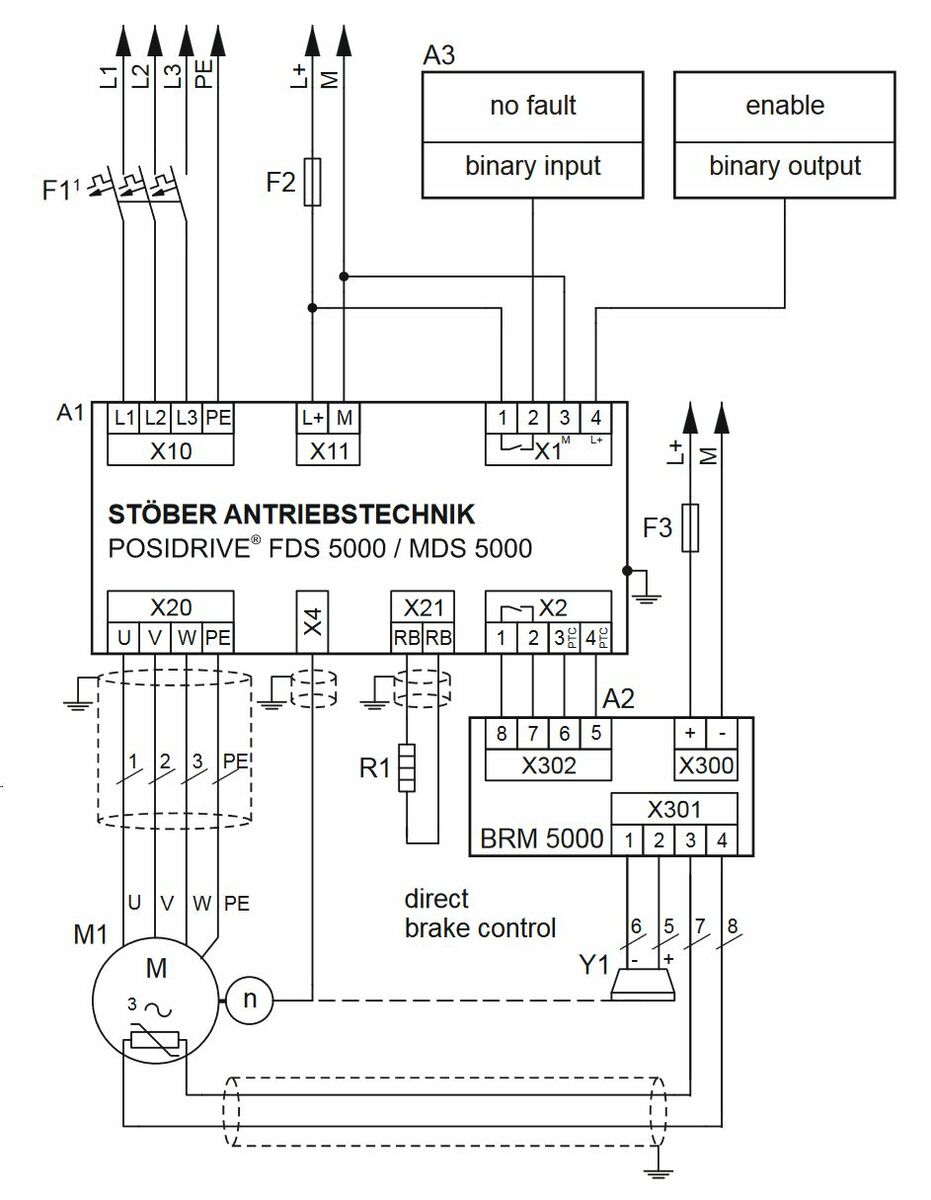
- przyłącze zasilania falownika od góry przetwornicy
- podłączenie silnika od dołu przetwornicy
- cyfrowe złącze enkodera inkrementalnego HTL lub TTL od dołu falownika
- możliwość podpięcia dwóch enkoderów inkrementalnych np. w celu pozycjonowania zewnętrznym enkoderem
- pełna ochrona termiczna silnika – wejście czujnika temperatury PTC
- możliwość bezpośredniego sterowania hamulcem na silniku
- możliwość sprzęgania stopni pośrednich falownika
- wbudowany czoper hamulca (mechaniczny selektor hamowania)
- możliwość bezpośredniego podpięcia rezystora hamowania
- szeregowe złącze RS232 (komunikacja sieciowa zgodna z protokołem USS)
- niezależne złącze zezwolenia na ruch (ENABLE / FREIGABE)
- PARAMODUL – zewnętrzna kość pamięci programu i parametrów
- 2 wejścia analogowe / 2 wyjścia analogowe
- 2 wejść cyfrowe / 2 wyjścia cyfrowe
- zintegrowane filtry sieciowe
- w klasie ochrony IP20
- obudowa metalowa z blachy ocynkowanej
- małe gabaryty przy wysokich mocach
- możliwość jazdy ręcznej z klawiatury na falowniku bez programowania
- bezpłatne oprogramowanie POSI-Tool
- oprogramowanie wyposażone w asystenta programowego
- wyposażony w aplikacje: pozycjonowanie komendowe, pozycjonowanie blokowe, szybka wartość zadana, komfortowa wartość zadana, synchronizacja MASTER-SLAVE, elektroniczna krzywka tarczowa
- możliwość regulacji: obrotowej, położeniowej, momentowej, częstotliwościowej
- symulacja silnika krokowego
- możliwość diagnostyki napędu, dzięki wbudowanemu oscyloskopowi.
Opcjonalnie:
- blokada rozruchu ASP5001: bezpieczne wyłączenie momentu
- niezależne zasilanie części sterującej 24V(DC)
- karty rozszerzeń komunikacji sieciowej: CANopen, Profibus-DP V1, EtherCAT
- karta rozszerzeń LEA5000: 8 wejść cyfrowych / 8 wyjść cyfrowych
- 24V moduł sterowania hamulcem BRM5000
Falowniki wektorowe POSIDRIVE FDS5000 posiadają 3 rodzaje sterowania:
1.U/f w zakresie od 0 do 400Hz
2.wektorowe bez sprzężenia zwotnego od 0 do 100Hz
3.wektorowe ze sprzężeniem zwrotnym od 0 do 100Hz
Standardowa współpraca falownika wektorowego z enkoderem inkrementalnym 1024imp/obr (sterowanie ze sprzężeniem zwrotnym) zabudowanym na silniku asynchronicznym 4-polowym umożliwia pracę stało-momentową w zakresie od 0obr/min do obrotów nominalnych silnika asynchronicznego to jest do 50Hz. Powyżej tej częstotliwości moment parabolicznie maleje, osiągając około połowy wartości momentu nominalnego przy 100Hz. Tak się odbywa przy pracy silnika asynchronicznego ustawionego w gwiazdę przy zasilaniu falownika 3 x 400V. Jeżeli zmienimy ustawienie silnika w trójkąt, wtedy możemy charakterystykę stało-momentową rozszerzyć od 0 do 87Hz tj. do 2500obr/min dla silnika asynchronicznego 4-polowego, ale w ten sposób zwiększymy moc i prąd silnika o pierwiastek z 3.
Dzięki standardowej współpracy falownika wektorowego POSIDRIVE FDS5000 z enkoderem inkrementalnym, przetwornica posiada standardowo wbudowany swój system pozycjonowania, do którego wprowadzamy zadaną długość, prędkość przejazdu oraz rampy przyspieszenia i hamowania. Pozycjonowanie odbywa się bez błędów, gdyż wprowadzamy precyzyjne przełożenie przekładni w postaci licznika i mianownika (dzięki ułamkowi nie ma błędów dzielenia), które możemy znaleźć w katalogu przekładni firmy STÖBER. Ponadto możliwy jest ruch położeniowy lub obrotowy w dowolnych jednostkach np. º, cm, mm, cale itp. Możliwe jest zaprogramowanie cyklu ruchów maksymalnie do 256 różnych pozycji, lub zadawanie drogi poprzez komunikację sieciową.
Szukaj
Szukaj
Falowniki Stöber
PRODUKCJA ZAKOŃCZONA

Posidrive FDS5000
Standardowo bogato wyposażone falowniki wektorowe POSIDRIVE FDS5000 - w zakresie mocy od 0,37kW do 7,5kW
Sterowanie :
skalarne, wektoroweZastosowanie skalarne:
pompy, wentylatory, lekkie rozruchy, taśmociągi i przenośnikiZastosowanie wektorowe:
napędy glówne maszyn, ciężkie rozruchy, ciężka praca
| TYP | FDS5007 | FDS5004 | FDS5008 | FDS5015 | FDS5022 | FDS5040 | FDS5055 | FDS5075 | |||||
| Zalecana moc silnika | 0,75kW | 0,37kW | 0,75kW | 1,50kW | 2,20kW | 4,0kW | 5,50kW | 7,5kW | |||||
| Napięcie zasilania | ( L1 – N ) 1 x 230V +20%/-40%, 50/60Hz |
(L1-L3) 3 x 400 V +32%/-50% 50Hz (L1-L3) 3 x 480 V +10%/-58% 60Hz |
|||||||||||
| Zabezpieczenie sieciowe | 1 x 10 AT | 3 x 6 AT | 3 x 6 AT | 3 x 10 AT | 3 x 10 AT | 3 x 16 AT | 3 x 20 AT | 3 x 20 AT | |||||
| Prąd znamionowy IN | 3 x 4,0 A | 3 x 1,3 A | 3 x 2,1 A | 3 x 4,0 A | 3 x 5,5 A | 3 x 10 A | 3 x 12 A | 3 x 16 A | |||||
| Prąd maksymalny Imax | 180% / 5s, 150% / 30s | ||||||||||||
| Częstotliwość przełączania | 4 kHz (nastawiana do 16kHz) | ||||||||||||
| Rezystor hamowania (opcja) | 100 Ω, maks.1,6kW | 200 Ω, maks.3,2kW | 100 Ω, maks.6,4kW | 47 Ω, maks.13,6kW | |||||||||
| Dopuszczalna długość kabla do silnika, ekranowanego | 50m | ||||||||||||
| Straty mocy przy Ia = IN | 80W | 50W | 65W | 90W | 110W | 170W | 180W | 200W | |||||
| Przekrój kabla | Maks.2,5mm2 | Maks.4,0mm2 | |||||||||||
| Wymiary (WxSxG) [mm] | 300 x 70 x 157 (175 – z rezystorem hamowania) | 300 x 70 x 242 (260 – z rezystorem hamowania) | |||||||||||
| Waga [kg] bez/z opakowaniem | 2,1 / 2,9 | 3,7 / 4,8 | |||||||||||
| Maks.napięcie DC | 440 V | 830 V | |||||||||||
| Maks.napięcie DC czopera | 400 V / 420 V | 780 V / 800 V | |||||||||||
| Napięcie DC wyłączeniowe czopera | 360 V / 380 V | 740 V / 760 V | |||||||||||
| Napięcie wyjściowe | Od 3 x 0 do napięcia zasilającego | ||||||||||||
| Częstotliwość wyjściowa | 0 – 400Hz | ||||||||||||
| Eliminacja zakłóceń | EN 61800-3, emisja zakłóceń, Klasa A | ||||||||||||
| Certyfikaty międzynarodowe | CE | ||||||||||||
| Temperatura przechowywania/transportu | -20ºC do +70ºC, maksymalna zmiana : 20 K / h | ||||||||||||
| Temperatura otoczenia | 0 do 45ºC ze znamionowymi danymi, do 55ºC ze zmniejszoną mocą 2,5% / ºC | ||||||||||||
| Względna wilgotność podczas działania | Wilgotność 85%, bez kondensacji | ||||||||||||
| Wysokość instalacji | Bez ograniczeń do 1000m.n.p.m, od 1000 do 25000m.n.p.m redukcja mocy 1,5% / 100m | ||||||||||||
| Stopień zabrudzeń | Drugi stopień zabrudzenia zgodnie z EN 60204 / EN 50178 | ||||||||||||
| Stopień zabezpieczenia | IP20 | ||||||||||||
| Pozycja pracy | Głównie pionowa | ||||||||||||
| Wentylacja | Wbudowany wentylator | ||||||||||||
infolinia: 48 331 20 57 | napisz do nas
Informacje o plikach
Wszystkie pliki pdf dokumentacji i instrukcji obsługi są skompresowane do fortmatu zip. Pozwala to zmniejszyć rozmiar pliku i ułatwia jego transport lub przechowywanie.